Mobil Otonom dan Tingkatannya
Perkembangan teknologi sudah semakin pesat sehingga apa yang dulu hanya dapat kita saksikan di film-film fiksi ilmiah lambat laun mulai menjadi kenyataan. Salah satu contohnya adalah mobil yang dapat berjalan sendiri tanpa perlu dikemudikan (mobil otonom). Dengan teknologi ini pemilik kendaraan tidak perlu repot lagi untuk mengemudikan kendaraan yang dimilikinya, cukup hanya duduk manis dan memasukkan tujuan maka secara otomatis mobil akan berkendara menuju tujuan tentunya dengan memperhitungkan jalan yang akan digunakan serta memperhitungkan arus lalu lintas pada jalan yang telah dipilih untuk dilalui sehingga akan meminimalisir penggunaan bahan bakar kendaraan serta meminimalisir terjadinya kecelakan. Survei yang dilakukan oleh Global Positioning Specialists (GPS) di Amerika menyebutkan bahwa kehadiran mobil otonom dapat mengurangi kecelakaan dan juga mengurangi kerugian yang diakibatkan oleh kecelakaan sebesar US$ 340 juta atau jika kita konversikan ke dalam rupiah sama dengan Rp 4,5 triliun. Tidak dapat dipungkiri memang, bahwa terjadinya kecelakaan berlalu lintas hampir sebagian besar disebabkan karena kelalaian pengemudi. Oleh karena itulah dengan adanya mobil otonom diharapkan dapat mengurangi kecelakaan berlalu lintas.
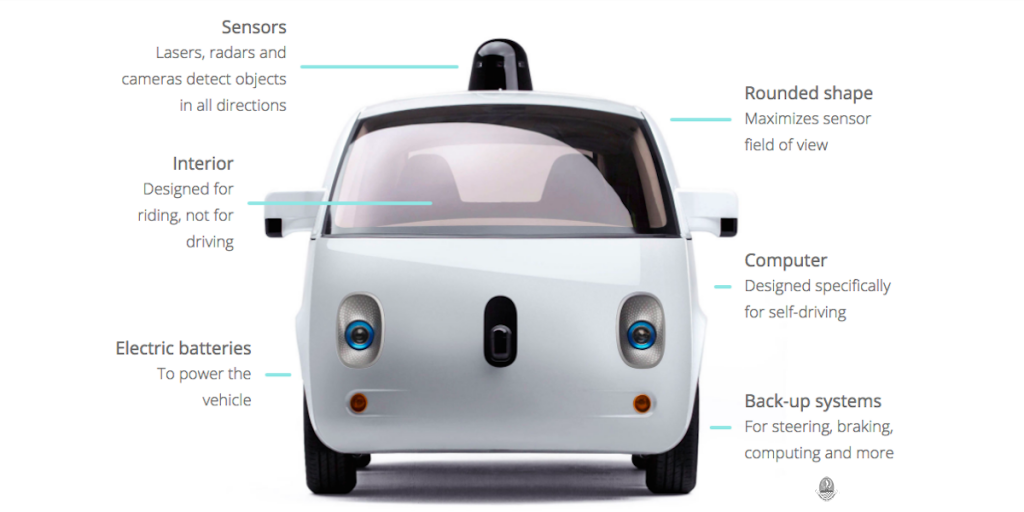
Mobil otonom memang dirancang dengan kemampuan untuk mengenali lingkungan sekitarnya dengan menggunakan banyak sensor untuk mengumpulkan data atau informasi tentang sekitarnya. Banyaknya sensor yang disematkan pada sebuah mobil otonom diharapkan dapat menjamin keamanan dan keselamatan orang yang berada di dalamnya. Karena sebenarnya sensor-sensor tersebut merupakan perwakilan dari sosok pengemudi yang memiliki kemampuan untuk melihat dan menilai kondisi lingkungan sekitar dan kondisi di jalanan. Sensor-sensor yang disematkan pada sebuah mobil otonom terdiri dari dari kamera digital, Global Positioning System (GPS), radar, laser, dan sensor ultrasonik. Data yang diterima oleh sensor-sensor lalu akan diolah oleh sistem komputer mobil sehingga akan dihasilkan keputusan kapan harus melakukan akselerasi, kapan harus berhenti, kapan harus menyalakan lampu, dan keputusan-keputusan yang biasanya dibuat oleh pengemudi ketika dihadapkan dengan situasi tertentu.
Salah satu perusahaan yang menggeluti teknologi mobil otonom ini adalah Google. Dahulu proyek mobil otonom Google ini diberi nama Google self-driving car project yang saat ini telah berganti nama menjadi waymo. Proyek mobil otonom Google dimulai pada tahun 2009 dan pada tahun 2015 lalu proyek mobil otonom Google ini meluncurkan mobil otonom pertamanya di jalanan. Mobil otonom yang dikerjakan oleh waymo ini memiliki sensor dan perangkat lunak yang didesain untuk mendeteksi pejalan kaki, kendaraan, dan masih banyak yang lainnya dari jarak yang jika dibandingkan panjangnya sama dengan panjang dua buah lapangan sepakbola. Sama dengan yang akan dilakukan oleh pengemudi manusia, mobil otonom waymo ini akan melambatkan lajunya ketika didepannya ada pengendara sepeda yang memberikan isyarat menggunakan tangan ketika hendak berbelok sehingga memberikan kesempatan kepada pengendara sepeda untuk berbelok.
Teknologi mobil otonom yang dikembangkan dan digunakan oleh setiap perusahaan berbeda-beda, oleh karena itulah Bryant Walker Smith seorang profesor di University of South Carolina School of Law and School of Engineering dan salah satu ahli dibidang mobil otonom menjelaskan bahwa ada 5 tingkatan untuk menjelaskan tingkat otonom dari sistem yang digunakan oleh mobil tanpa supir.
Berikut adalah penjelasannya sebagaimana dilansir dari techrepublic :
1. Tingkat 0
Pengemudi (manusia) mengendalikan semuanya agar kendaraan dapat berjalan sesuai dengan yang diinginkan (saat ini kita berada pada tingkat 0)
2. Tingkat 1
Pada tingkat ini hampir semua fungsi dikendalikan oleh manusia namun beberapa fungsi sudah dapat dikerjakan secara otomatis oleh sistem
3. Tingkat 2
Pada tingkatan ini, pengemudi sudah tidak meletakkan tangannya dibalik kemudi dan pedal gas. Namun, pada tingkatan ini pengemudi masih diharuskan siap siaga untuk mengambil alih kemudi jika terjadi hal-hal yang tidak diinginkan.
4. Tingkat 3
Pengemudi masih harus ada namun tidak perlu memperhatikan keadaan sekitar karena tugas tersebut telah diambil alih oleh sistem.
5. Tingkat 4
Tingkat dimana kendaraan sudah otonom, pada tingkat ini sistem kendaraan sudah dirancang untuk melakukan semua fungsi mengemudi baik itu keselamatan maupun kritis dan memantau kondisi jalan untuk seluruh perjalanan. Namun pada tingkat ini tidak semua skenario perjalanan atau kondisi jalan dapat diatasi oleh sistem.
6. Tingkat 5
Tingkat paling atas pada mobil otonom, dimana pada tingkat ini sistem mobil otonom sudah menyerupai pengemudi (manusia) dalam menghadapi situadi dan keadaan di jalanan.
Masih belum dapat dipastikan kapan mobil-mobil otonom pada tingkat 5 ini sudah dapat kita lihat lalu lalang dijalanan, namun beberapa pabrikan kendaraan sudah mulai mengeluarkan mobil-mobil yang berada pada tingkat 1 dan dapat kita lihat berada di jalanan. Tentunya dengan hadirnya teknologi mobil otonom ini kehidupan kita akan lebih terbantu dan akan lebih mudah, selain itu juga tingkat kecelakaan yang terjadi sebagai akibat dari kelalaian manusia dapat diminimalisir.

